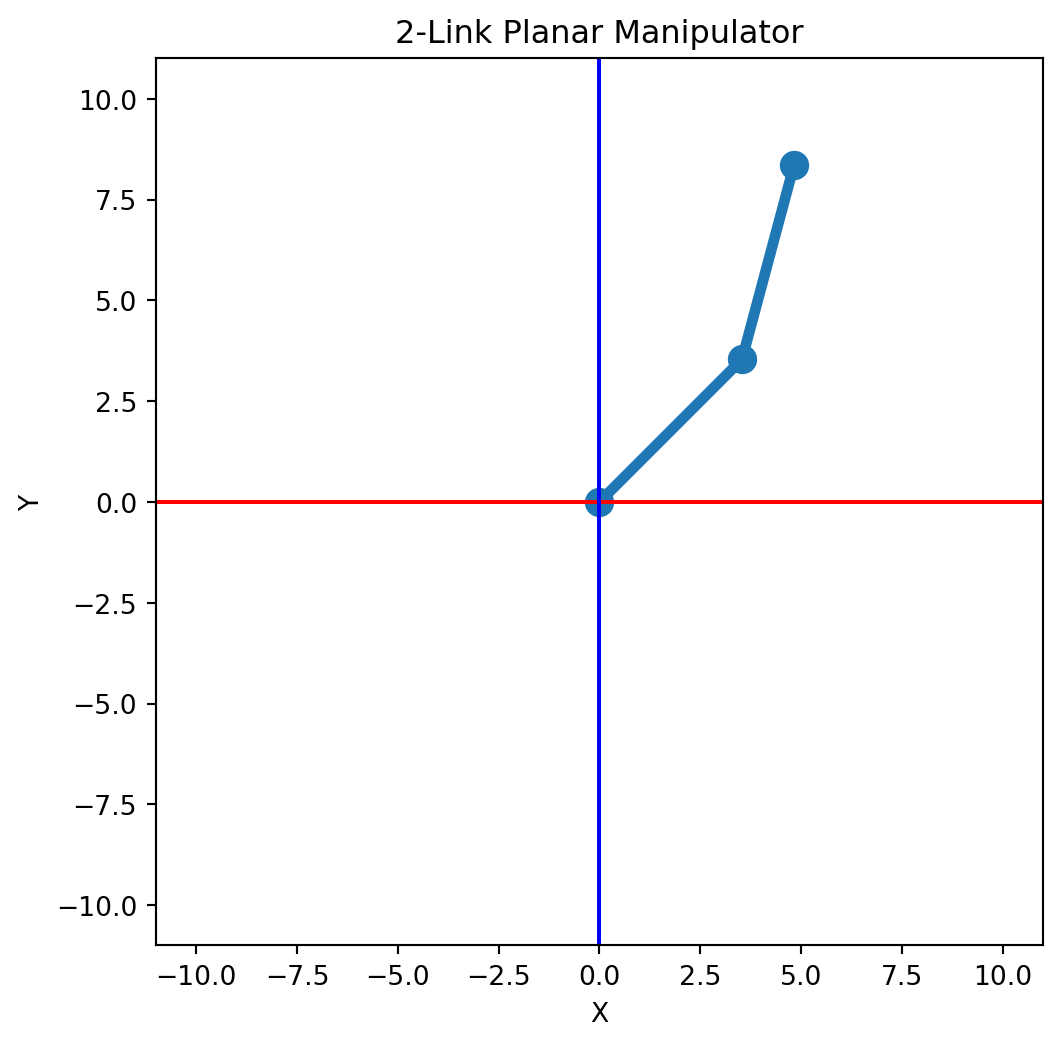
Simulating Forward Kinematics of 2-Link Planar Manipulator using Python
This article demonstrates the forward kinematics of a two-link planar robotic manipulator. Forward kinematics involves determining the position and orientation of the end-effector given the joint variables and link parameters.
To describe the kinematic structure of the manipulator, we use the Denavit–Hartenberg (DH) convention, which represents the spatial relationship between successive coordinate frames using four parameters: joint angle \(\theta_i\), link offset \(d_i\), link length \(a_i\), and link twist \(\alpha_i\).
Denavit–Hartenberg Transformation Matrix
Using the standard DH convention, the homogeneous transformation matrix that relates frame \(i\) to frame \(i-1\) is given by:
This matrix incorporates both the rotation and translation between two consecutive links of the manipulator (also knows as screw motion).
Overall Forward Kinematics
For a manipulator with \(n\) links, the transformation matrix that relates the end-effector frame \(n\) to the base frame \(0\) is obtained by multiplying the individual link transformation matrices: